About me
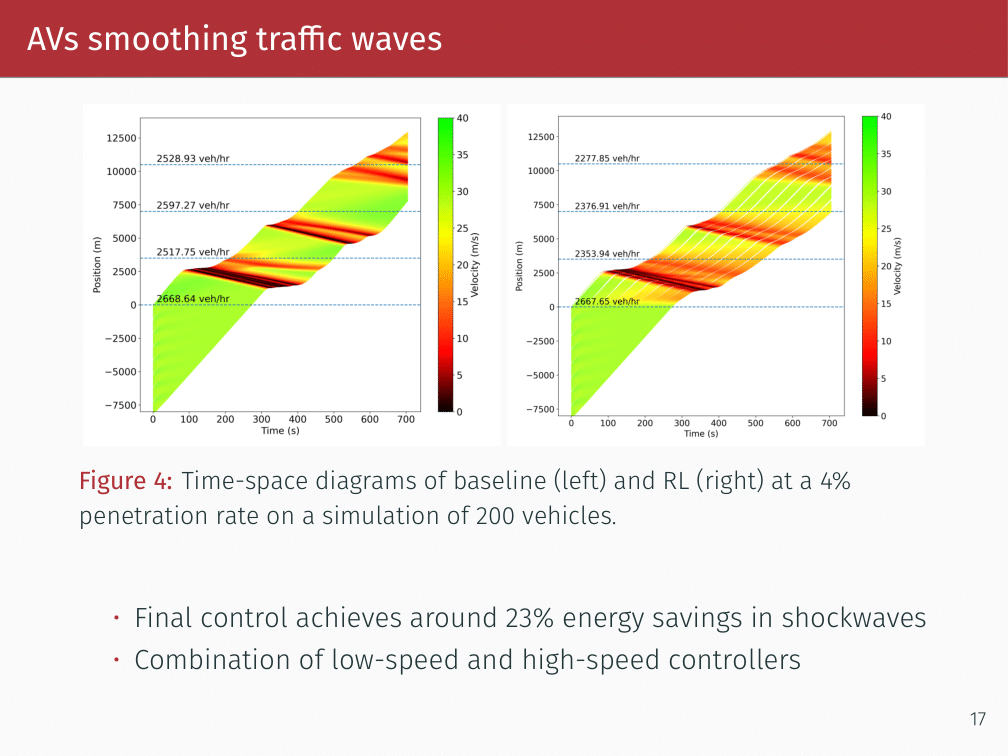
I graduated with a PhD in EECS from UC Berkeley, focusing on deep learning and reinforcement learning, under the supervision of Alexandre Bayen in Berkeley AI Research (BAIR). I worked on RL for autonomous driving and traffic optimization, culminating in CIRCLES, the largest traffic smoothing field test to date, where I designed and trained RL agents to control 100 autonomous vehicles in live highway traffic during rush-hour. More broadly, I've applied AI to control multi-agent systems, built fast data-driven simulators for RL, and integrated PDE-inspired models with neural networks for accurate long-term sequential traffic forecasting. I am also interested the potential of language models in control systems.
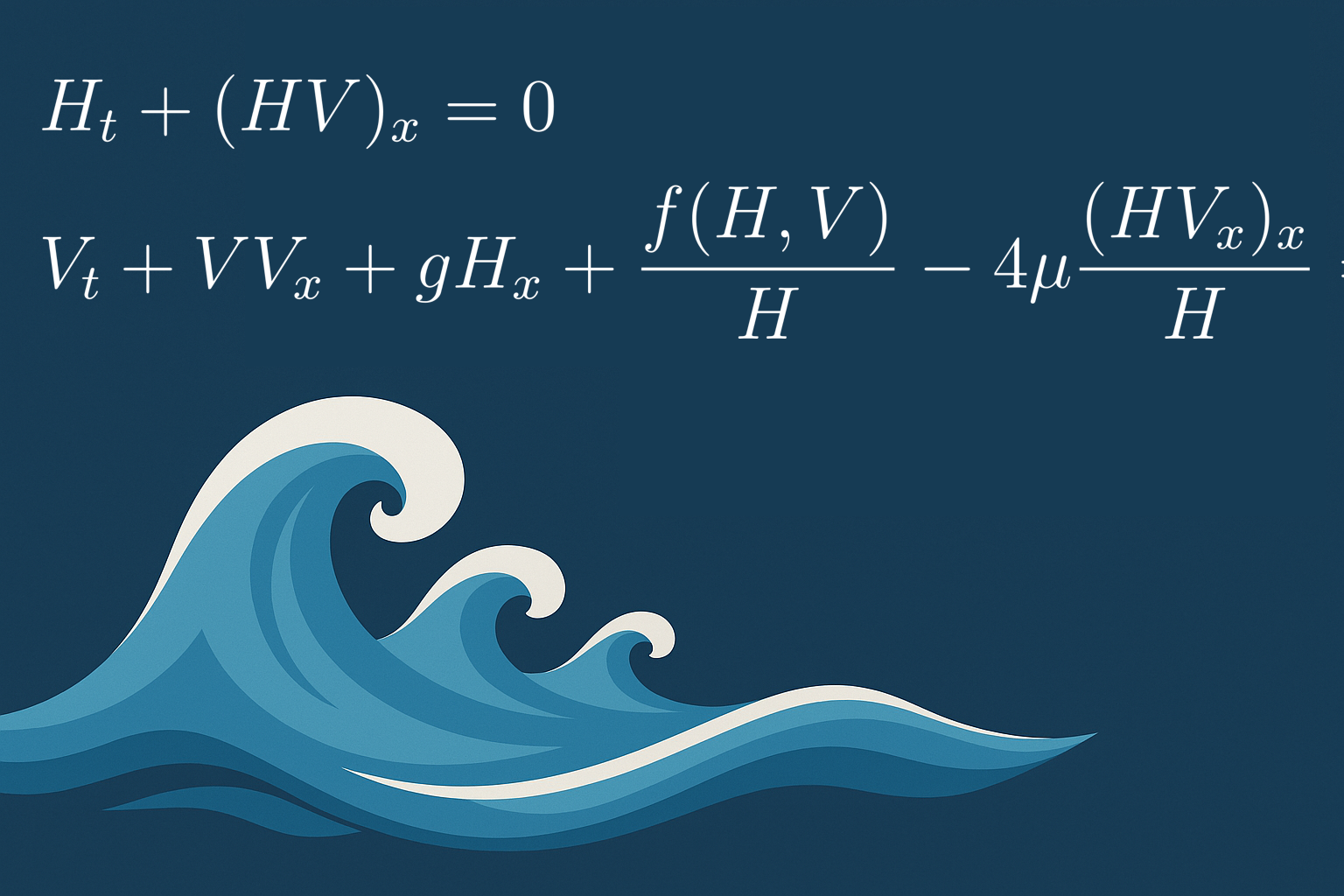
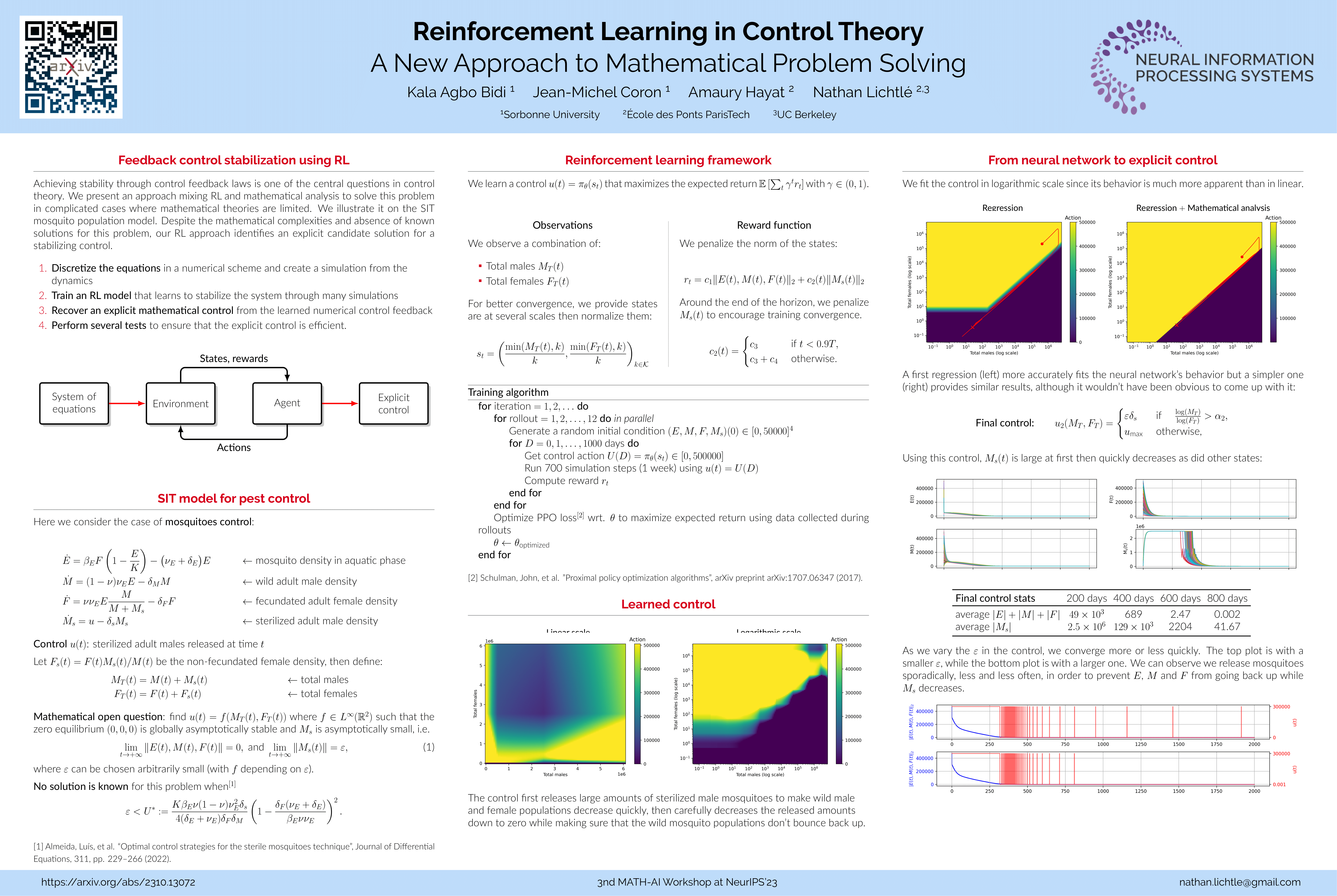
I graduated with a PhD in Applied Mathematics and Control at École nationale des ponts et chaussées (CERMICS), working with Amaury Hayat on control, PDEs, and reinforcement learning. I proved boundary stabilization results for viscous Saint‑Venant flows using a new explicit Lyapunov function, and developed hybrid RL methods that yield explicit, robust feedback laws under limited sensing. I also built AI‑augmented PDE solvers for long‑horizon conservation laws and led RL‑based traffic‑smoothing controllers culminating in the 100‑vehicle CIRCLES field deployment.
Previously, I completed my B.S. and M.S. (MVA Master) at École Normale Supérieure (ENS) Paris-Saclay, in the CS department.